16 ноября 2016
Системы автоматического включения освещения, вентиляции и тому подобного, реагирующие на присутствие человека – часть автоматизированных систем «умного дома» и «умного производства», основанная на беспроводных инфракрасных датчиках движения. Стандартный срок непрерывной работы такого датчика от одной литиевой батареи – 4…7 лет. Инженерам компании Texas Instruments удалось продлить этот срок до 10 лет, повысив тем самым эффективность системы.
Беспроводной ИК-датчик движения, реализованный в проекте TIDA-00489
Производитель Texas Instruments (TI) продемонстрировал возможность непрерывной работы устройства в течение 10 лет с использованием одной литиевой батареи. Этот результат достигнут благодаря применению в данном проекте наномощных усилителей и компараторов, а также низкоэнергетичного микроконтроллера (МК) субгигагерцевого диапазона из семейства SimpleLink.
Основные характеристики датчика движения:
- использование наномощных аналоговых микросхем обеспечивает десятилетний срок службы от одной литиевой батареи CR2032 без ее замены;
- малый ток потребления 1,65 мкА в режиме ожидания (детектор движения при этом находится в активном режиме);
- сверхнизкий ток потребления в активном режиме благодаря применению малопотребляющего микроконтроллера со встроенным радиопередатчиком (1,12 мА в течение 104,1 мс);
- работа в беспроводной сети субгигагерцевого диапазона с управлением по прерываниям;
- работа по прерываниям при передаче центральному контролеру информации о движении объекта обеспечивает экономию электроэнергии;
- дальность обнаружения движения достигает девяти метров.
Области применения:
- автоматизированные системы управления инженерным оборудованием зданий;
- защита от вторжения посторонних лиц;
- обнаружение наличия людей в помещении;
- системы мониторинга помещений;
- системы обнаружения движения;
- устройства с батарейным питанием.
Описание системы
Современные системы промышленной автоматики и автоматизированные системы управления инженерным оборудованием зданий используют датчики движения для управления различными функциями, основанными на присутствии человека, например, освещением, что позволяет повысить эффективность системы, к примеру, выключая освещение, когда в нем нет необходимости. Использование большого числа беспроводных датчиков позволяет сделать системы управления более гибкими для дальнейшего расширения и снизить затраты на установку путем исключения проводных датчиков. Вместе с тем одним из главных ограничений для большой беспроводной сети является организация электропитания, ввиду того, что для систем с питанием от батарей расходы на техническое обслуживание, связанные с периодической заменой этих источников питания, могут оказаться слишком высокими. В зависимости от энергопотребления и конфигурации батарей, пассивные инфракрасные (ИК) датчики движения с батарейным питанием могут работать 4…7 лет без замены батареи.
Разработанный компанией TI малопотребляющий ИК-датчик движения для беспроводной сети субгигагерцевого диапазона увеличивает максимальный срок службы литиевой батареи до 10 лет, благодаря использованию наномощных усилителей и компараторов и беспроводного МК семейства SimpleLink с ультранизким энергопотреблением.
Структурная схема ИК-датчика движения проекта TIDA-00489 показана на рисунке 1. Датчик включает в себя ИК-детектор с аналоговым выходом, два наномощных операционных усилителя (ОУ), два наномощных компаратора, МК беспроводной сети со сверхнизким потреблением и литиевую батарею CR2032. На двух ОУ выполнен активный полосовой фильтр с высоким входным сопротивлением, что позволяет подключать его непосредственно к выходу датчика, не внося нагрузку в его выходную цепь. Два компаратора образуют двухпороговую схему, позволяющую сравнить усиленный выходной сигнал ИК-детектора с фиксированными порогами и отличить полезный сигнал, обусловленный движением объекта, от шума. Два выхода двухпорогового компаратора являются источниками прерываний МК беспроводной сети, благодаря чему МК может оставаться в малопотребляющем спящем режиме до тех пор, пока не будет обнаружено движение, и «просыпаться» только по факту обнаружения движения для отправки сообщения удаленному контроллеру беспроводной сети. Благодаря наноамперному токопотреблению аналоговых компонентов, данный проект TI позволяет достичь десятилетнего срока службы датчика от одной литиевой батареи CR2032.
Рис. 1. Структурная схема беспроводного ИК-датчика движения
Принцип работы детектора движения
Использованный в проекте TIDA-00489 маломощный ИК-детектор обнаруживает движение объекта путем выявления в своем поле зрения колебаний энергии ИК-излучения. Поскольку выходной сигнал ИК-детектора имеет очень низкий уровень, его необходимо усилить и отфильтровать от помех, чтобы минимизировать ложные срабатывания датчика движения. Усиленный до необходимого уровня аналоговый сигнал ИК-детектора преобразуется затем в цифровые сигналы посредством двухпорогового компаратора, выходы которого могут быть использованы в качестве источников прерываний МК беспроводной сети, что позволяет активизировать МК только при обнаружении движения.

Рис. 2. Принцип работы ИК-детектора движения
Пассивный ИК-детектор движения состоит из двух или более пироэлектрических элементов, выходное напряжение которых пропорционально интенсивности падающего на них инфракрасного излучения. Каждая пара пироэлектрических элементов соединена последовательно таким образом, что при воздействии ИК-излучения от окружающей среды в диапазоне комнатных температур и отсутствии движения выходные напряжения каждого элемента одинаковы, и в результате суммарное напряжение на выходе детектора равно нулю. Принцип работы пассивного ИК-детектора движения показан на рисунке 2.
В нижней части рисунка 2 показана форма выходного сигнала детектора при движении объекта с температурой, отличающейся от температуры окружающий среды, параллельно поверхности датчика в поле зрения обоих пироэлектрических элементов. Размах этого сигнала (от пика до пика) пропорционален скорости движения объекта и расстоянию от объекта до детектора, и находится в диапазоне от нескольких милливольт до нескольких сотен микровольт или менее. Полевой транзистор типа JFET используется в качестве повторителя напряжения и обеспечивает постоянное смещение на выходе датчика.
Из-за малых геометрических размеров пироэлектрических элементов для увеличения дальности и поля зрения детектора движения перед ним помещается линза Френеля, которая собирает и фокусирует ИК-излучение на чувствительные элементы детектора движения. Тип линзы обычно выбирается из условий размещения датчика в конкретной окружающей обстановке. Наилучшие результаты применения датчика движения достигаются при движении объекта параллельно поверхности датчика (по сравнению с движением перпендикулярно поверхности датчика), кроме того, датчик следует размещать вдали от сильных источников тепла с меняющейся интенсивностью, например, комнатных вентиляторов и ламп накаливания.
Также следует отметить, что после включения питания необходим интервал времени до 30 с или больше для адаптации пироэлектрических элементов детектора к условиям окружающей среды. Это является ключевым моментом при разработке подсистемы обнаружения движения, так как достижение максимального срока службы батареи предполагает постоянную подачу питания на детектор для обеспечения его правильной работы и надежного обнаружения движения.
Аналоговая часть датчика движения
Электрическая схема аналоговой части датчика движения показана на рисунке 3. Первые два каскада представляют собой активный полосовой фильтр, совмещающий в себе функции усиления и фильтрации сигнала, третий каскад является двухпороговым компаратором. Элементы R10 и С5 выполняют функцию фильтра нижних частот для стабилизации напряжения питания детектора движения. Резистор R5 задает ток смещения выходного полевого транзистора ИК-детектора движения. Для снижения тока, потребляемого детектором, номинал R5 выбран больше рекомендуемого значения, при этом из-за уменьшения тока питания детектора происходит снижение его чувствительности и повышение уровня выходного шума, что, однако, является разумным компромиссом для увеличения срока службы батареи. Отчасти потеря чувствительности детектора может быть скомпенсирована увеличением коэффициента усиления и числа каскадов активного фильтра. В связи с более высоким коэффициентом усиления в каскадах фильтра и более высоким уровнем шума на выходе детектора необходимо тщательно оптимизировать расположение высокочастотного полюса фильтра и пороги компаратора, чтобы избежать ложных срабатываний.
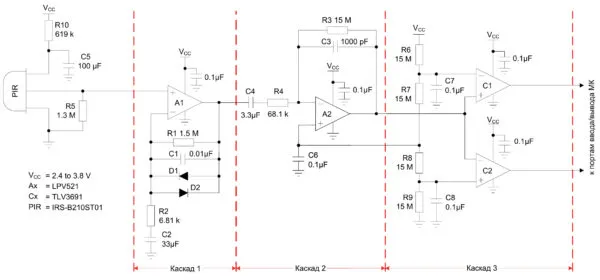
Рис. 3. Электрическая схема аналоговой части ИК-датчика движения
Разработка схемы электропитания датчика
Из-за увеличивающегося в течение срока эксплуатации импеданса батареи питания и низкого коэффициента подавления помех по питанию ИК-детектора движения схему питания необходимо спроектировать таким образом, чтобы предотвратить ложные срабатывания в тракте аналогового сигнала от выбросов тока, создаваемых работой МК. Несмотря на то что алгоритм, реализованный в программе МК, помогает фильтровать ложные срабатывания, паразитная петля обратной связи через источник питания может стать серьезной проблемой. В идеале для разрыва паразитной петли обратной связи по питанию ИК-детектор следует питать от стабилизированного источника, однако дополнительный ток покоя стабилизатора приведет к сокращению срока службы батареи, поэтому в данном проекте были исследованы другие способы подавления ложных срабатываний.
На рисунке 4 показана упрощенная схема узла электропитания датчика. Для защиты от подключения батареи в обратной полярности вместо используемого обычно диода Шоттки применен p-канальный МОП-транзистор. Поскольку пиковые токи при работе радиопередатчика находятся в диапазоне 30 мА, использование МОП-транзистора с низким сопротивлением канала RDS_ON обеспечивает значительно меньшее падение напряжения по сравнению с диодом Шоттки. Это позволяет максимально увеличить срок службы батареи, позволяя ей разряжаться до более низкого напряжения, при котором устройство еще может функционировать (более подробно об этом методе читайте в [1]).
Рис. 4. Схема электропитания датчика
Конденсатор C1 обеспечивает питание схемы в коротких интервалах пикового токопотребления, что позволяет максимально использовать емкость батареи и минимизировать «просадку» напряжения на шине питания, что особенно актуально к концу срока службы батареи, когда значительно увеличивается ее внутреннее сопротивление (обозначенное на рисунке 4 как Rint). Детальный расчет необходимой емкости буферного конденсатора С1 и оценка влияния пиковых токов потребления на срок службы батареи приведены в [2].
Алгоритм работы встроенного ПО
Алгоритм работы беспроводного ИК-детектора движения, показанный на рисунке 5, описывает работу МК CC1310 в составе макетной платы, разработанной в рамках данного проекта компании TI. Работа программы МК CC1310 начинается с идентификации источника активации. Если пробуждение МК произошло по сигналу сброса, выполняется подпрограмма первого включения — МК CC1310 будет находиться в режиме ожидания в течение двух минут для установления рабочего режима ИК-детектора и аналоговой части схемы. По прошествии двух минут программа проверяет состояние выходов двухпорогового компаратора. В режиме ожидания выходы обоих компараторов должны иметь низкий уровень сигнала. Если какой-либо из выходов компаратора имеет высокий уровень, МК CC1310 посылает сообщение об ошибке (“ERROR”) и снова переходит в режим ожидания до установления рабочего режима датчика. После установления рабочего режима ИК-детектора и аналоговой части схемы МК CC1310 переходит в спящий режим с низким энергопотреблением.
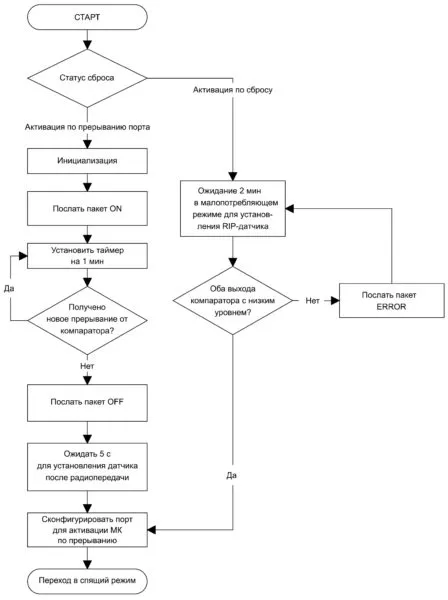
Рис. 5. Алгоритм работы беспроводного ИК-датчика движения
Он будет находиться в спящем режиме до тех пор, пока не получит прерывание с выходов компаратора, означающее, что ИК-детектор обнаружил движение. При пробуждении по прерыванию от ИК-детектора, МК CC1310 посылает пакет “ON”, чтобы сообщить контроллеру сети об обнаружении движения. Далее МК CC1310 будет ожидать неактивного состояния ИК-детектора в течение одной минуты, после чего отправит пакет “OFF” контроллеру сети и вернется в спящий режим.
Обзор аппаратных средств датчика
На рисунке 6 показан прототип ИК-датчика беспроводной сети субгигагерцевого диапазона с низким энергопотреблением и 10-летним сроком службы литиевой батареи. Печатная плата прямоугольной формы имеет размеры 35х75 мм и поставляется в комплекте с нейлоновыми стойками диаметром 0,5″, упрощающими работу с ней при проведении испытаний в лабораторных условиях.
Рис. 6. Основные элементы макетной платы беспроводного ИК-датчика движения
Все интегральные микросхемы (CC1310, LPV521 и TLV3691), несколько контрольных точек, перемычки и антенна расположены на верхней стороне печатной платы.
На нижней стороне печатной платы размещены держатель литиевой батареи CR2032, перемычка J6 и нижняя часть антенны. Четыре неиспользованных порта ввода-вывода выведены из МК CC1310 на свободную сторону платы, что облегчает в дальнейшем макетирование и отладку устройства.
Конфигурация перемычек
Для облегчения измерения критических параметров и отладки программы в данной макетной плате имеется несколько перемычек, расположение которых показано на рисунке 6. Конфигурация перемычек для рабочего режима выглядит следующим образом: J1 — замкнута, J2 — разомкнута, J3 — разомкнута, J6 — замкнута. Конфигурация перемычек для режима программирования МК CC1310 выглядит следующим образом: J1 — разомкнута (источник питания подключен к выводу 2), J2 — подключена через ленточный кабель к оценочной плате SmartRF06 (EVM), J3 — разомкнута, J6 — не используется.
Описание контрольных точек макетной платы
Макетная плата ИК-датчика движения включает в себя несколько контрольных точек для измерения параметров сигналов в наиболее важных цепях:
- ТР1, ТР2 — точки заземления для пробников или общие цепи для измерения напряжения;
- TP6, TP7 — выходы компараторов, соответственно, верхнего и нижнего порогов;
- TP8 — вход встроенного преобразователя постоянного тока в МК CC1310, на который подается отфильтрованное батарейное питание;
- TP9 — отфильтрованное выходное напряжение преобразователя МК CC1310;
- TP13 — выход активного фильтра, являющийся также входом двухпорогового компаратора.
Программные средства датчика
Встроенное программное обеспечение для данной макетной платы было разработано с использованием интегрированной среды разработки (ИСР) Code Composer Studio компании TI (версия 6.1.0). Более подробную информацию по программированию МК CC1310 можно найти в [3].
Для питания платы необходимо напряжение 3,0 В, которое подается на вывод 2 перемычки J1. При использовании внешнего источника питания необходимо учитывать, что подключение питания в этой точке осуществляется в обход схемы защиты от обратной полярности подключения батареи.
Загрузка программного обеспечения
Программирование платы осуществляется путем подключения 10-проводного плоского шлейфа от разъема J2 макетной платы к 10-контактному разъему ARM Cortex Debug Connector P410 оценочной платы SmartRF06 EVM (рисунок 7).

Рис. 7. Подключение оценочной платы SmartRF06 к макетной плате ИК-датчика движения для программирования и отладки
Прием пакетов данных
Как было описано ранее, данная макетная плата TI запрограммирована на обнаружение присутствия человека с помощью ИК-детектора движения. МК CC1310 может передавать значения, соответствующие трем возможным состояниям датчика:
- 0xEE — ошибка при включении датчика (пакет “Error”);
- 0xAA — пакет включения (“ON”) при первом обнаружении движения;
- 0xFF — пакет выключения (“OFF”) через одну минуту после последнего обнаружения движения.
Есть два способа просмотра переданного пакета с целью проверки правильности передачи данных по радиоканалу.
Анализ трафика беспроводных субгигагерцевых сетей автоматизированных систем управления зданиями
Первый способ основан на использовании программы перехвата трафика с графическим интерфейсом пользователя (GUI), работающей на оценочной плате SmartRF06 с радиоканалом, выполненном на CC13xxEM. Программа перехвата трафика (Packet Sniffer Software) обрабатывает полученный пакет и отображает вычисленные значения на ЖК-экране. Как показано на рисунке 8, программа позволяет отображать только шесть последних принятых значений. Если для тестирования или снятия характеристик системы необходимо большее число данных – следует использовать второй способ, который позволяет регистрировать большее число данных для последующего анализа.
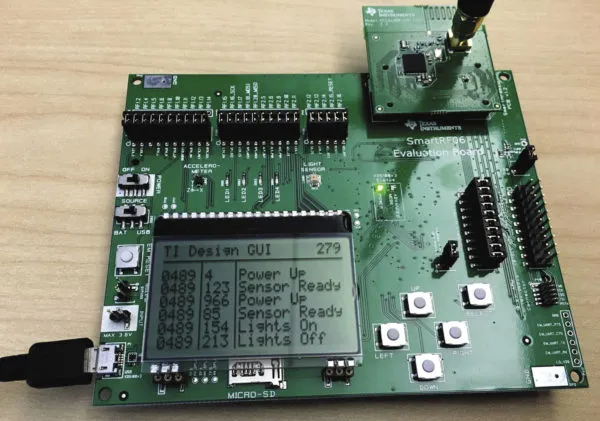
Рис. 8. Работа программы перехвата трафика беспроводных субгигагерцевых сетей автоматизированных систем управления зданиями
Использование беспроводного USB-адаптера CC1111 и программы SmartRF для перехвата пакетов
Второй способ перехвата трафика основан на использовании беспроводного USB-адаптера CC1111 USB EVM Kit 868/915 МГц и программы SmartRF™ Protocol Packet Sniffer. Данные отображаются на экране в исходном виде, однако поток данных может быть подвергнут последующей обработке и использован для тестирования и определения характеристик системы. После установки программы анализа пакетов (версии 2.18.1 на момент написания статьи), процедура обнаружения передаваемых данных выглядит следующим образом:
- Подключите USB-адаптер CC1111 в свободный USB-порт компьютера с установленной программой перехвата трафика.
- Запустите программу анализа пакетов, выберите протокол «Generic» и нажмите кнопку “Start” (рисунок 9).
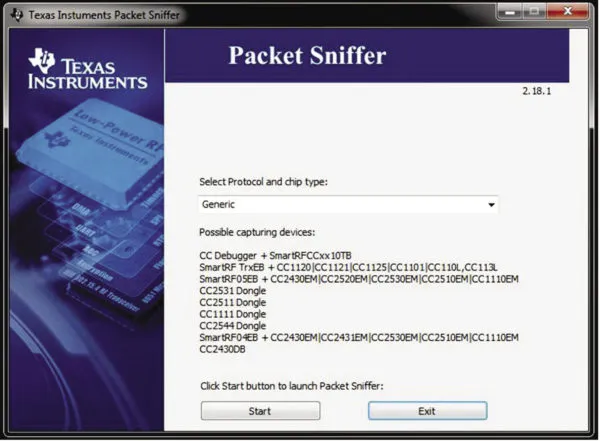
Рис. 9. Окно запуска программы перехвата трафика
- Настройте CC1111 для корректного отображения пакетов данных. Выберите вкладку “Radio Configuration” (конфигурация радиоканала). Нажмите на кнопку «Browse…», находящуюся под вкладкой “Register settings” (настройки регистров). Откройте файл TIDA-00489_CC1111.prs. Выделите и дважды кликните на «TIDA-00489_CC1111», чтобы применить настройки регистров, показанные на рисунке 10.
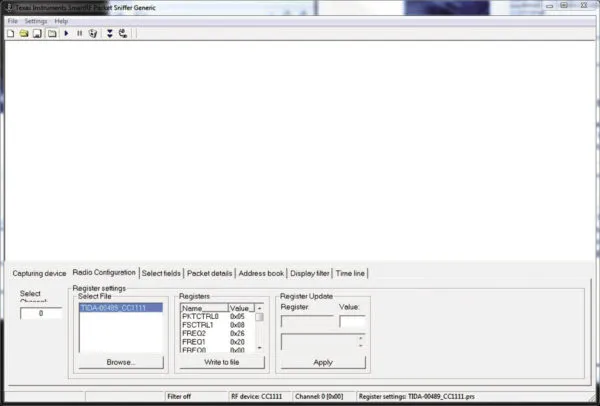
Рис. 10. Окно настройки конфигурации программы перехвата трафика
- Для запуска процесса перехвата пакетов нажмите кнопку ‘Play” на верхней панели окна программы.
- Программа анализа пакетов может обнаружить посторонние пакеты данных. Примените фильтр для просмотра только достоверных пакетов данных. На рисунке 11 показан пример окна просмотра неотфильтрованных данных. Выделенная строка показывает посторонний пакет данных.
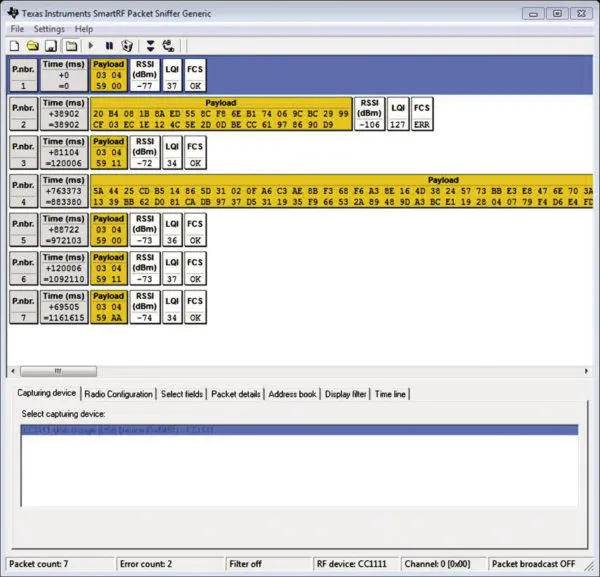
Рис. 11. Окно неотфильтрованных пакетов данных
- Для того чтобы добавить фильтр, отображающий только достоверные пакеты, выберите вкладку ”Display filter”. В поле ”Field Name” из выпадающего списка выберите «FCS». Нажмите на кнопку «First». Измените настройки фильтра так, чтобы показывать только пакеты с отметкой «OK», введя «FCS = OK» в поле ”Filter condition», далее нажмите кнопку ”Add”, а затем – кнопку «Apply». На рисунке 12 показаны примеры окна просмотра отфильтрованных данных.
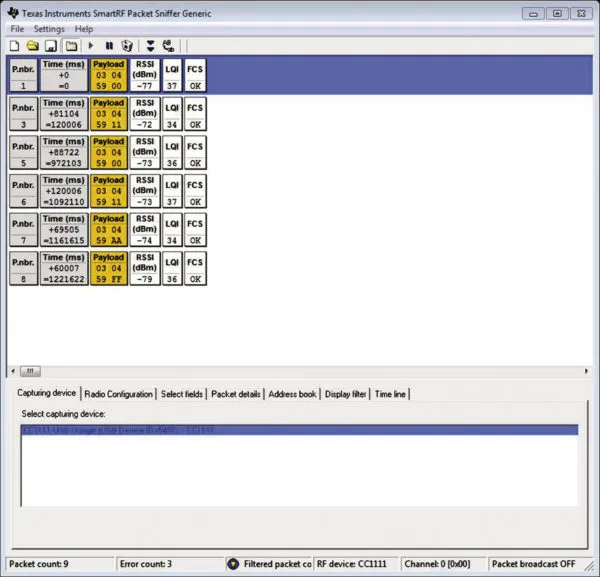
Рис. 12. Окно отфильтрованных пакетов данных
- Для экспорта перехваченных отфильтрованных пакетов нажмите на кнопку “Save the current session” (“сохранить текущий сеанс”) на панели инструментов (значок с изображением дискеты) или приостановите перехват пакетов и нажмите File → Save data… из контекстного меню файла. В в обоих случаях программа предложит сохранить отображаемые данные как пакет данных перехвата (файл с расширением .psd).
- Используйте программу редактора шестнадцатеричных чисел, например, HexEdit, для отображения данных из файла .psd в удобочитаемом виде.
- Откройте файл .psd в программе “HexEdit”, нажмите Tools → Options. В окне “Options” программы “HexEdit” нажмите Document → Display и измените значение “Columns” («Столбцы») на «2066». Нажмите Edit → Select All и Edit → Copy As Hex Text. Откройте текстовый редактор (например, «Блокнот»), вставьте шестнадцатеричные числа в виде текста и сохраните текстовый файл. Этот текстовый файл можно импортировать в электронную таблицу программы Microsoft® Excel® для дальнейшего анализа. Для получения дополнительной информации о формате перехваченного пакета данных нажмите Help → User Manual.
Характеристики энергопотребления
Ток потребления различных функциональных узлов датчика был измерен на предварительном макете. Эта информация использовалась в процессе разработки для того чтобы найти разумный компромисс между сроком службы батареи с одной стороны и характеристикой чувствительности детектора движения и напряжением питания датчика – с другой. Эти же данные были использованы для сравнения с результатами испытаний окончательного варианта макета, чтобы убедиться в хорошей корреляции между предварительными и окончательными результатами. Кроме того, на прототипе была исследована зависимость потребляемого тока от напряжения питания. Результаты измерения тока потребления приведены в таблицах 1 и 2.
Как видно из данных, приведенных в таблице 1, существует хорошая корреляция между измеренными в макетной плате значениями тока потребления и номинальными расчетными значениями. Данные из таблицы 2 показывают также небольшую положительную зависимость потребляемого тока от напряжения питания. Это означает, что расчет срока службы батареи на основе средних значений тока потребления выполнен с запасом ввиду того, что потребляемый ток будет уменьшаться по мере старения батареи.
Таблица 1. Ток потребления различных функциональных узлов датчика
| Функциональный узел датчика | Ток потребления в спящем режиме, нА | |
| Номинальное значение | Измеренное значение | |
| Детектор движения | 600 | 594 |
| Сдвоенный компаратор | 150 | 150 |
| Делитель | 50 | 50 |
| Операционный усилитель 1 | 374 | 360 |
| Операционный усилитель 2 | 409 | 380 |
| МК CC1310 | 100 | 120 |
| Всего для датчика | 1683 | 1654 |
Два основных режима работы, показанные в таблице 2, соответствуют режимам, описанным на рисунке 5. В столбце «Разность токов» показано, насколько увеличивается потребляемый ток при переходе из спящего в активный режим — это значение используется при расчете срока службы батареи. Последняя строка в таблице 2 добавлена исключительно в ознакомительных целях, так как при таком низком напряжении питания значительно увеличивается выходной шум ИК-детектора движения, вследствие чего возрастает вероятность ложных срабатываний датчика. Ток потребления при минимальном напряжении питания был измерен с помощью пользовательской программы, удерживающей МК в спящем режиме и игнорирующей прерывания, вследствие чего в таблице 2 нет данных по току потребления в активном режиме при этом напряжении питания.
Таблица 2. Ток потребления датчика в различных режимах работы
| Напряжение питания Vcc, В | Ток потребления, мкА | ||
| Спящий режим | Активный режим | Разность токов | |
| 3,8 | 1,75 | 2,46 | 0,71 |
| 3,6 | 1,73 | 2,45 | 0,72 |
| 3,3 | 1,69 | 2,36 | 0,67 |
| 3,0 | 1,65 | 2,3 | 0,65 |
| 2,7 | 1,64 | 2,28 | 0,64 |
| 2,4 | 1,6 | 2,22 | 0,62 |
| 2,2 | 1,59 | – | – |
Данные по энергопотреблению были использованы в следующем разделе для расчета планируемого срока службы батареи в различных условиях эксплуатации.
Расчет срока службы батареи
Расчет времени автономной работы макетной платы осложняется наличием множества различных вариантов применения и условий эксплуатации данного типа датчиков. Подход к решению этой задачи основан на вычислении среднего значения для двух вероятных, но отличающихся друг от друга условий эксплуатации и одного наихудшего варианта использования датчика. Эти условия использования датчика представлены следующим образом:
- вариант 1 (наихудший) — 10 движений в час каждый час в течение всего срока службы батареи. Каждое движение объекта в поле зрения датчика является отдельным событием, то есть вызывает прерывание и, по завершении работы таймера, МК возвращается в спящий режим до появления следующего прерывания.
- вариант 2 — офисное помещение, 14 часов спящего режима и 10 часов непрерывного движения, при котором таймер не успевает сброситься до следующей активации.
- вариант 3 — помещение с непостоянным характером движения в рабочее время, 14 часов спящего режима и 10 движений каждый час в течение 10 часов, причем каждое движение, как и в случае 1, является отдельным событием.
Одним из способов оптимизации срока службы батареи в данной макетной плате является продолжительность активного режима таймера. Значение по умолчанию в программе составляет одну минуту. Поскольку этот параметр можно легко изменить, для демонстрации возможности увеличения срока службы батареи случаи 1 и 3 были пересчитаны для продолжительности работы таймера 30 с.
Формула для расчета срока службы батареи выглядит следующим образом:
где
Понижающий коэффициент в формуле учитывает саморазряд батареи. Анализ результатов расчетов показывает, что планируемый средний срок службы батареи в данной макетной плате с установкой таймера на 1 минуту составляет 11,22 года. Пересчет срока службы для случаев 1 и 3 с установкой таймера на 30 с дает значения, соответственно, 9,9 и 11,99 года. Средний срок службы батареи с установкой таймера на 30 с составляет таким образом 11,34 года. Для наихудшего случая установка таймера на 17 с или менее увеличивает срок службы батареи как минимум до 10 лет.
Функциональные характеристики
Чувствительность детектора движения
Чувствительность датчика была измерена для нескольких типов детекторов движения с различными параметрами цепей питания и двух коэффициентов усиления Av активного фильтра. В таблице 3 приведены сводные данные результатов этих измерений. Выделенная ячейка этой таблицы показывает чувствительность детектора движения для конфигурации, реализованной в макетной плате данного проекта TI.
Таблица 3. Чувствительность ИК-детекторов движения в различных режимах работы
| Наименование | Ток потребления в спящем режиме, нА |
Vout, В DC | Максимальная дальность обнаружения при Av = 90 дБ, м | Максимальная дальность обнаружения при Av = 70 дБ, м |
| RS = 2,2 МОм, RD = 1 МОм | ||||
| IRS-B210ST01 | 365 | 0,78 | 6,1 | 1,83 |
| IRS-B340ST02 | 355 | 7,62 | 2,44 | |
| IRA-E700ST0 | 500 | 3,66 | 1,37 | |
| IRA-E712ST3 | 555 | 3,96 | 1,52 | |
| RS = 1,3 МОм, RD = 620 кОм | ||||
| IRS-B210ST01 | 594 | 0,77 | > 9,14 | 1,98 |
| IRS-B340ST02 | 572 | 8,23 | 2,44 | |
| IRA-E700ST0 | 838 | 4,57 | 1,52 | |
| IRA-E712ST3 | 920 | 5,18 | 2,29 |
Дальность беспроводной связи
Дальность передачи данных по радиоканалу, измеренная в типичной офисной обстановке с частичным перекрытием линии прямой видимости, составила 220 м. Уровень радиосигнала на максимальном удалении, измеренный с помощью анализатора пакетов CC1111, составил менее – 100 дБм?. Несмотря на то, что полученную дальность, учитывая малые размеры антенны на печатной плате, можно считать отличным результатом, имеются способы увеличения этого расстояния. Первый из них основан на использовании штыревой антенны, имеющей более высокий коэффициент усиления по сравнению с антенной на печатной плате. Другим способом является увеличение мощности передатчика CC1310 до максимального уровня за счет некоторого увеличения потребляемого тока в моменты передачи данных.
Литература
- Application Report: Reverse Current/Battery Protection Circuits, http://www.ti.com/lit/an/slva139/slva139.pdf.
- White Paper SWRA349: Coin cells and peak current draw, http://www.ti.com/lit/wp/swra349/swra349.pdf.
- Быстрый старт разработки беспроводного канала 868 МГц на CC1310. Новости Электроники №3, 2016 г.
Получение технической информации, заказ образцов, заказ и доставка.
•••
Как сделать самому датчик движения?
Изготовление датчика движения самому может быть достаточно сложным процессом, требующим знаний электроники и программирования. Однако, если вы хотите попробовать сделать датчик движения самостоятельно, то можно попробовать следующий простой метод:
Материалы и инструменты:
- Датчик движения PIR;
- Arduino Uno или аналог;
- Провода;
- Резисторы;
- Беспаяное поле;
- Батарейный отсек;
- Аккумулятор;
- Реле.
Шаги:
- Подготовьте все необходимые материалы и инструменты.
- Соедините плату Arduino с датчиком движения PIR, используя провода и резисторы, как показано в схеме.
- Подключите батарейный отсек и аккумулятор к плате Arduino, используя провода и реле.
- Загрузите программу для датчика движения на плату Arduino, используя Arduino IDE или другое средство программирования.
- Проверьте работоспособность датчика движения, выполнив несколько тестовых замеров.
Этот метод может быть полезен для начинающих электронщиков, но не обязательно даст профессиональный результат. Важно понимать, что самодельные датчики движения не всегда работают так же эффективно, как готовые изделия профессиональных производителей.